New SUT HQ at 2 John Street
Dear SUT Members and friends – the year is flashing past and in the last week we’ve moved the HQ office to 2 John Street, London WC1N 2ES – after two years in a basement we are now in a third-floor office with natural daylight should you be passing by and want to say hello. Our new telephone number is +44 (0)20 3405 9035. The nearest tube station is still Chancery Lane, and we’re not far from Russell Square.
Since I last wrote to you SUT members have been busy hosting events, training courses and social activities including Houston’s Crawfish Boil, Perth’s meeting on the Future of Subsea Autonomy, Newcastle’s meeting on Deep Sea Exploration and a Flexible Flowlines event at our Middle East branch.

Sue John chair of the education committee at Charles Dickens School Southwark July 2019
I spoke on the theme of ‘Blue Future – underwater technology and the Blue Economy’ at London and Southern England Branch’s Lunch & Learn on 12th June, and enjoyed presenting to young future professionals at the Charles Dickens School in Southwark in July – we don’t often get a chance to speak to 6 and 7-year-olds and they really do ask some of the best questions. One young lad was interested in how electronic devices can be made waterproof for use at sea – as he had learned the hard way that tablet devices don’t last long if played with in the bath! I was really impressed by how well-briefed the youngsters were, they even asked questions about deep sea mining, and one young lady wanted to be an explorer on the oceans of Saturn’s moon Titan. Gives me real hope for the future!

Steve at IEEE-OES Oceans 2019
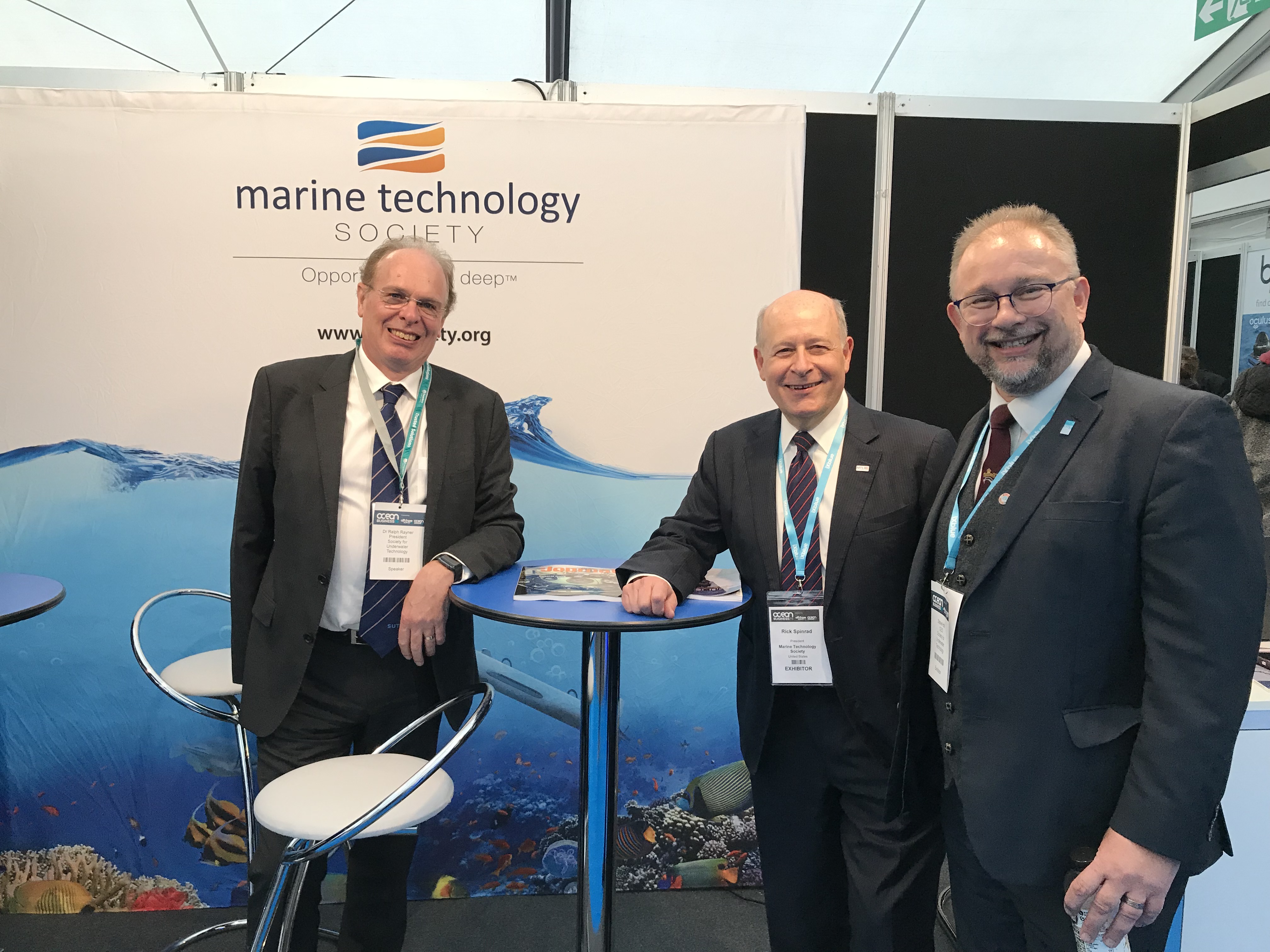
I was invited to Marseilles by our friends in the Marine Technology Society who offered us a free booth in their space at the IEEE-OES Oceans 2019 conference. I couldn’t stay for more than a day, but it was good to be there, meet delegates and learn about how SUT can work with MTS and the IEEE-Oceanic Engineering Society in future years. We share much in common and face similar challenges of recruitment and retention of members, attracting investment and sponsorship, and ensuring that our members are well prepared for the challenges of this century such as the transition to renewable and low-carbon energy, developing new ocean industries like mining and deepwater aquaculture, and encouraging the next generation to choose to work in our sector when there is so much competition for their talents.

Full-size model of BRIDGES glider at IEEE-OES Oceans 2019
At the end of June, I briefly attended the UNESCO Intergovernmental Oceanographic Commission Assembly where SUT is a valued Observer Member, and one of the few organisations present who are able to provide an industry perspective. As a former Vice-Chair of UNESCO IOC I was warmly welcomed, and able to talk to delegates from the countries where we have branches, as well as to some from countries where we are not yet active, but would very much like to host Branches in the future. The two big stories in global ocean policy development at the moment are the forthcoming UN Decade of Ocean Science for Sustainable Development 2021-2030, and the developing new UN Convention on the Law of the Sea on the conservation and sustainable use of marine biological diversity of areas beyond national jurisdiction. SUT members will increasingly find themselves working in international waters as the search for mineral and biological resources move further offshore in future years, & the accompanying new legal structures will become part of the operational life of offshore corporations. SUT through our Policy Advisory Committee, informal contacts, and membership of the various advisory bodies will play a part in ensuring that all voices are heard when designing future legal regimes and standard operating procedures. If it’s an area that interests you, get in touch and we can see how we can use the talents within our membership to make a lasting impact.

Keith Broughton at the LSE Lunch & Learn 12th June
We also supported the IMarEST ‘Engine as a Weapon VII’ workshop in London at the start of July. Modern warships use their engines to drive massive generators to produce the wattage required to drive the ship, power the electronics and as we move into an almost sci-fi world, power lasers, rail-guns and electro-magnetic catapults. It’s not a big part of SUT’s areas of interest, but we do have members working in the defence sector and as submarines become mother ships for a host of exotic autonomous and remote-controlled platforms, it promises to be an area of future growth as our world traverses a tense period in international relations.

Meeting of Middle East Branch at Mubarak Marine Dubai (credit: Sirena marketing)
Another interesting collaboration in recent weeks has been to work with the Nautical Archaeology Society to raise awareness of the wreck of The London, a very rare Cromwell-era warship that was lost by explosion in the Thames Estuary in 1665. Her remains are very close to the dredged channel and the valiant team of marine archaeologists and volunteers who are exploring the wreck in the narrow windows between tides would dearly love for a SUT Member with access to high-resolution seabed sub-bottom profiling equipment to be able to have a look at what lies beneath. Long-standing SUT Member Tony Taylor has been working with the Nautical Archaeology to help raise funds and awareness of the fate of the ship – see https://www.nauticalarchaeologysociety.org/appeal/save-the-london – I can put you in touch with Tony and the NAS team if you are interested in helping the appeal.
Business Development Meetings
As we try and navigate SUT back into better health and growth, a team of experienced members led by Chair of Council David Saul is meeting monthly and working with me to drive initiatives to generate new membership, retain the people we already have, and explore how to raise revenue and reduce costs. At the July meeting of Council we also agreed to conduct a strategic business review to look at all aspects of the organisation, objectives, and structures of SUT so that we are fit for purpose and have appropriate systems in place to run and grow the Society. I’ll keep you informed of progress as the review proceeds, which in intended to be complete in time for the Annual General Meeting in December.
Accreditation
Work continues of having our first trial of the Professional Accreditation scheme that we are intending to license from IMarEST starting in September, and our Australian Branch is close to launching a scheme with Engineers Australia very soon too – so for the first time you will be able to be a Member of SUT and have full professional accreditation as well. For the HQ-based scheme, the first cohort will be for Chartered Marine Technologists, and we will roll out Chartered Marine Engineer and Chartered Marine Scientist as we gain experience of processing the applications. More from me very soon on this. For more detail on the existing IMarEST CMarTech registration see https://www.imarest.org/membership/membership-registration/apply-for-professional-registration/chartered-marine-technologist-cmartech – the SUT system will be very similar with no reduction in the expected level of professional achievement, we will, however, carry out our own accreditation interviews and reviews.
Alongside SUT, IMarEST are also going to license the scheme to the Marine Technology Society, so SUT and MTS will work closely together in how we train assessors, cooperate with IMarEST and maintain the highest professional standards.
Forthcoming Events & Meetings
Regularly check out https://sut.org/events/ for news on upcoming events – for instance in the next few weeks Houston will be hosting technical meetings & their annual clay shoot competition, I’ll be attending the final workshop of the BRIDGES programme to develop an autonomous vehicle optimised for supporting the deep subsea mining industry, Perth will host technical & social events, and as we move into September the Middle East Branch are hosting a meeting on flexible, umbilical & cable installation & China Branch host the 8th SUT Technical Conference in Zhejiang. Aberdeen will be holding their popular ‘gadgets and widgets’ evening event on 18th September. London & Southern England branch will have an evening meeting on deep sea mining, Singapore Branch have a technical meeting on the 19th September, and the OSIG South West Geoforum will take place at the end of September at Brunel’s SS Great Britain – always a wonderful venue.

Meeting of Middle East Branch at Mubarak Marine Dubai (credit: Sirena marketing)
Other key events that we are involved with include Offshore Europe in Aberdeen at the start of September – the first event at the new Aberdeen P&J Live events venue next to Aberdeen airport. SUT will be at Stand 1M53. October brings the Marine Alliance for Science & Technology Scotland’s annual science meeting in Glasgow where SUT will host the salvage and decommissioning workshop, and later in the month, the AUT 2019 Conference takes place in Perth, Australia. Evening meetings will be taking place across the branches including ‘plastics in the ocean’ at the North of England branch on 2nd October, Salvage, and UXO in Aberdeen, and in November we get in the same week the ADIPEC event in Abu Dhabi, a Commercial UAV event we’ve been invited to attend in London, and Oceanology China in Shanghai where I will be chairing the marine autonomous systems sessions. I’ll also be speaking at IMarEST’s international conference on Marine Engineering & Technology in Oman the week before ADIPEC so plenty of opportunities to promote SUT in the Middle East coming up.
Aberdeen & Houston will be hosting Subsea Awareness Courses, which are increasing in popularity now that industry is returning to strength. We are developing new courses too for the offshore wind industry and other users – if you are interested in helping us to develop new courses, or volunteering to teach one, please get in touch.
Academic Members
The SUT has long-standing corporate members from academic & research institutions across the world. They train the next generation of young engineers, technologists, scientists, lawyers, finance experts and policy makers that we rely upon across our sector, and of course are the great knowledge creation hubs that will help us meet the challenges of feeding & providing resources & energy to 9 billion + human beings by the middle of this century. In coming newsletters I’ll start to feature our academic members in short descriptions of their institution, capabilities and how they can work with our industry members for mutual benefit. I’ve already visited universities in the UK, USA, Canada, Australia, China & Norway since joining as CEO two years ago and have a reasonable amount of material to hand, but please get in touch if your university isn’t yet a Corporate Member of SUT and you’d like to be featured in a future article.
Chris Milner

Chris Milner at the 2018 Aberdeen AGM
I’ll finish this newsletter with an appreciation of our valued colleague and former Aberdeen Chair Chris Milner who died tragically young on 9th July following a short illness. Chris was one of those people so full of energy and positiveness that you wonder how on Earth they manage to fit so much into their day. Foremost came his family – his wife Louise and sons Nick & Joseph were at the core of his busy life and always came first. His employer was BPP-Tech & Cables where for many years Chris had been the regional manager in Aberdeen. Chris was active in many fields, & found time to be a key member of SUT’s Aberdeen Branch, serving as Chair until a couple of years ago. Chris was also an elected Member of SUT Council – a role he carried out diligently and professionally. When I became CEO in 2017 he was one of the first to contact me, welcome me into the organisation and provide help and advice any time I needed it. I last saw Chris at All Energy in Glasgow in May, where he was excited by the possibilities presented to SUT by the growth of offshore renewables, and an advocate for us setting up a new chapter in the Central Belt area. It’s hard to believe he’s gone.
Many members of the Aberdeen Branch attended a memorial event for Chris on 31st July, where Branch Chair Daniele Petrone spoke of our high regard for Chris Milner, & Jim Mann gave a moving testimonial about Chris’s contributions to SUT and the Aberdeen subsea community. It was good to see so many SUT Members there to support Chris’s family.
Chair of London and Southern England Branch Richard Binks will be taking part in the Great North Run on 8th September to raise money for the Brain Tumour Charity in memory of Chris – if any of our members would like to support him the link is
https://www.justgiving.com/fundraising/binksygreatnorthrun
I’m also planning on honouring Chris’s memory with one of our scholarships this year – he was an enthusiastic supporter of young professionals and wanted to encourage people to enter our industry.
Next Newsletter
Being UK-based there’s a tendency for me to speak mostly about what’s happening in my own back yard, so if you’re at one of our overseas branches and want me to speak more about what your branch is doing, please send me any updates you wish me to include in the next newsletter.
For my Northern hemisphere readers please enjoy what’s left of the summer, for our friends in the South winter won’t last too much longer.